A polygonal mesh is merely an approximation. The question is triangle quality:
how dense should our polygons (triangles) be?
triangle minimal angle
Bezier curves alone cannot represent a circle.
Constructive solid geometry
A set of primitive shapes combined with different operations in infinitely many ways
Useful for raytracing. You don’t have to compute the shape, you check if the light ray hits the primitive (ANDing a bunch of booleans)
Not easy to do with meshes.
Spatial subdivision techniques
3D array of voxels
If object occupies a voxel space, turn voxel on
Mesh
A collection of vertices, edges and triangles
Each edge belongs to one face (no dangling edge)
Edge is a boundary edge if it only belongs to one face
Can more than 2 faces share one edge? Technically yes, but not manifold
Each vertex belong to one edge
Manifold
A mesh is a manifold
if every edge is adjacent to at most 2 faces.
if every vertex is either on a disk or half disk (i.e. the faces the vertex is adjacent to can be flattened into a 2D surface)
A mesh is a polyhedron if
it is a manifold and has no boundary (is closed)
every vertex is on a disk
vertex belongs to a cyclically ordered set of faces (local shape is a disk)
Orientation of faces (counterclockwise order = normal face)
A mesh is well-oriented if
all faces can be oriented consistently (all CCW/CW) such that each edge has two opposite orientations
Euler Poincare Characteristic $\Chi$
Defined for the surfaces of polyhedra as $\Chi = V - E + F$
Any sphere like shape: $\Chi = 2$.
Torus: $\Chi = 0$
Bow Torus: $\Chi = -2$.
See Poincare Conjecture.
Mesh representations
Independent Faces
Vertex lists (3 doubles per triangle in an array)
Repeat vertex (disk space waste)
No topological info
How to find the faces that share an edge with a particular face? $O(N)$ search
Floating point errors (not the same point, but comparison leads to identifying same point)
Indexed Face set
Still no topology information
But saves repeat vertices
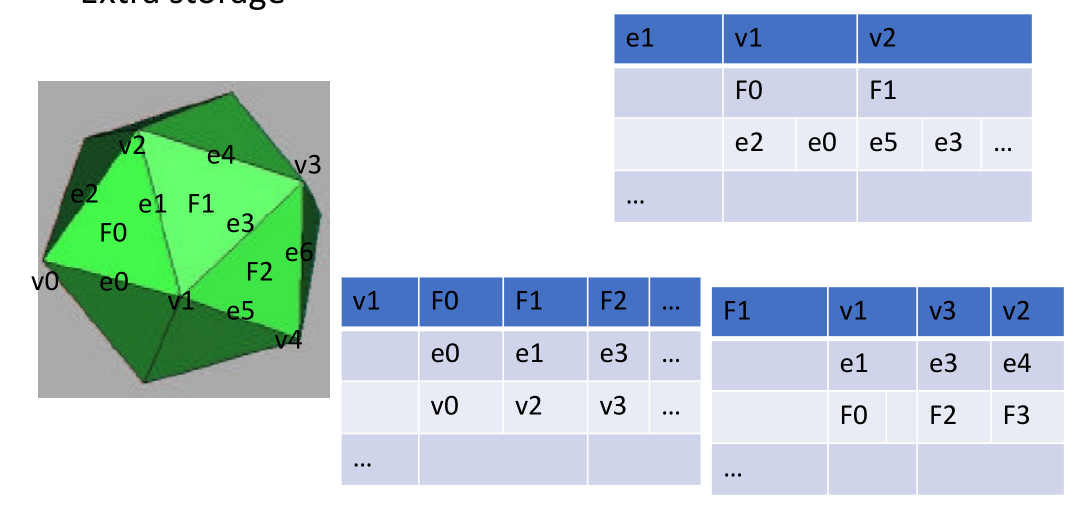
Adjacency Lists
3 adjacency lists: for vertices, edges and faces
For each vertex/edge/face: All vertices, edges and faces adjacent
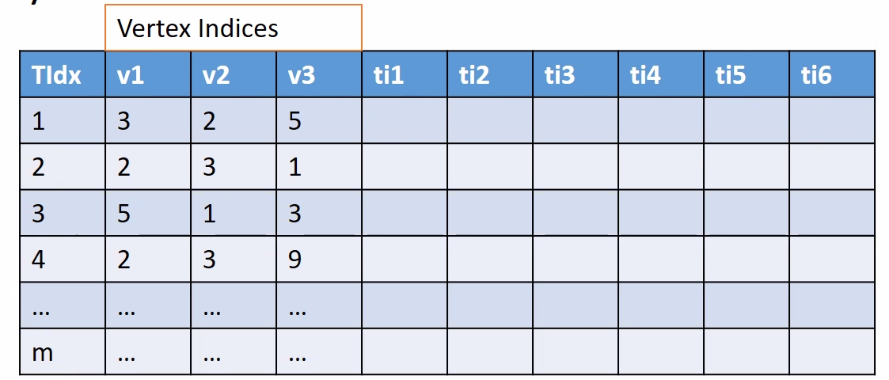
Trist
Oriented triangles: Adding an arrow to identify edge face orientation. (ABC = face with vertices face up in order A, B, C). They may be the same triangle, but are different “versions”
enext: “rotate” different orientation of the triangles in direction of the arrow
sym: “flips” the arrow
org(triangle): returns the first vertex of the oriented triangle
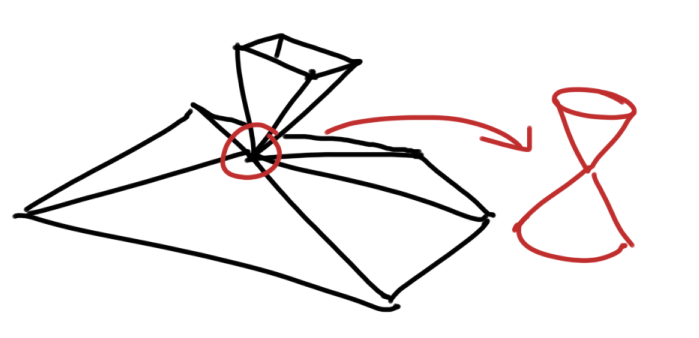
In $\mathbf{R}^3$, an edge can be shared by many triangles.
fnext: “rotate” orientation of the triangles in the right hand rule direction
The arrow shouldn’t ever change (fnext of abc should always be ab_)
Triangle has two representation:
Vertex array (no orientation/version)
we only have 6 versions of a triangle! How to concatenate the version number into one integer that can be stored with the vertex index number in the oriented triangle