Orientation-preserving isometry of 3D Euclidean plane.
Translation: $f(\mathbf{p}) = \mathbf{p + v}$
Rotation: $f(\mathbf{p}) = R\mathbf{p}$
For objects $K_1, K_2$, sample $S$ and $R$
Summary: To minimize the error $\sum_{i=0}^{n-1}|\mathcal{M}r_i - s_i|^2$, is to maximize \(q^T\left(\sum_{i=0}^{n-1}\bar{R}_i^TS_i\right)q\)
Goal is to find $q$. Can do so with Rodrigues’ Formula.
$\bar{Q}^T Q$ is a rotation by $\theta$ around the axis defined by a vector $(u_x, u_y, u_z)$ if \(Q = q = \cos (\theta/2) + \sin (\theta/2)(u_x \mathbf{i} + u_y \mathbf{j} + u_z \mathbf{k})\)
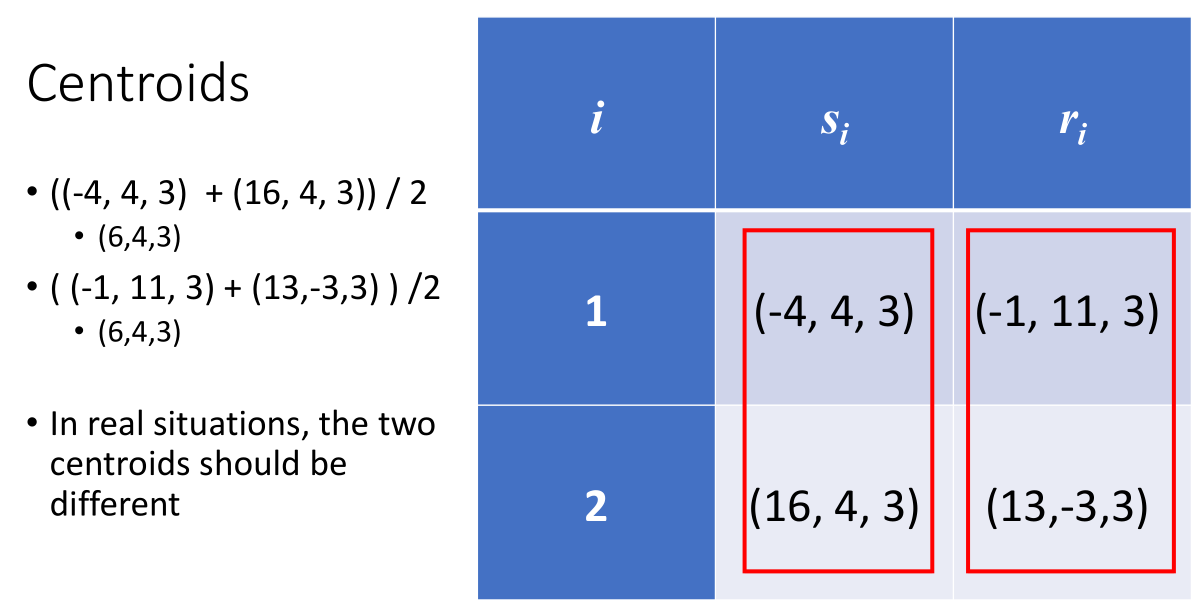
Build the table matching each $s \in S$ to $r \in R$ and compute each pair’s centroids
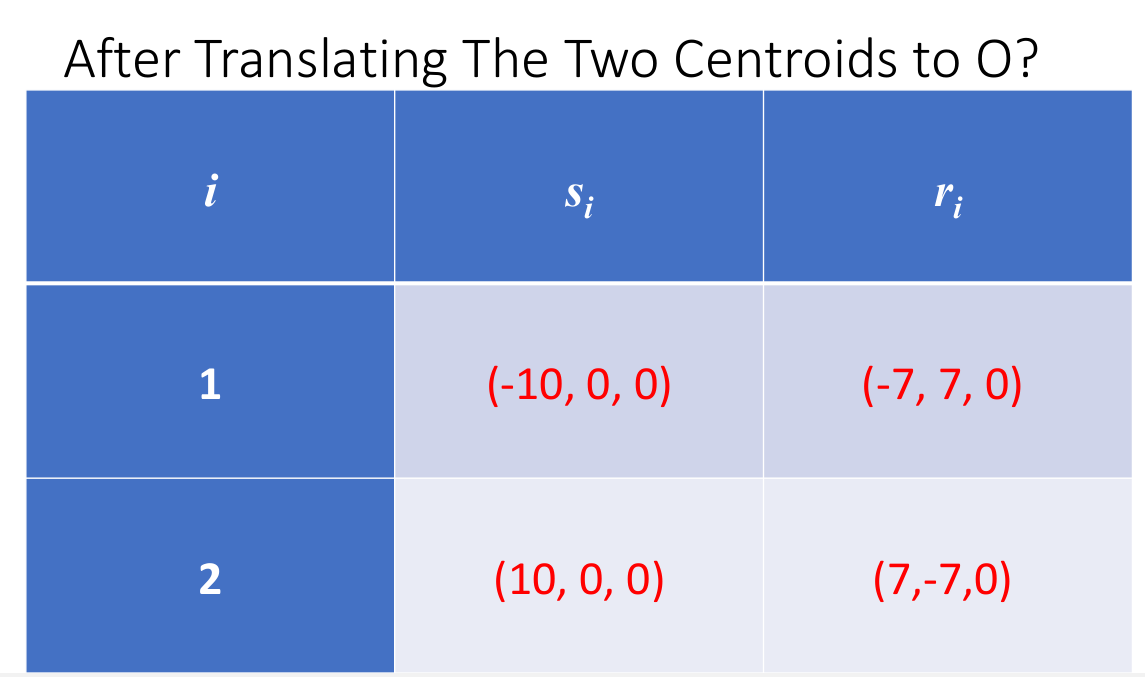
Froim each vertex, minus its pair-centroid
Each vertex is converted into the imaginary part of the quarternion $(1, v_x, v_y, v_z)$.
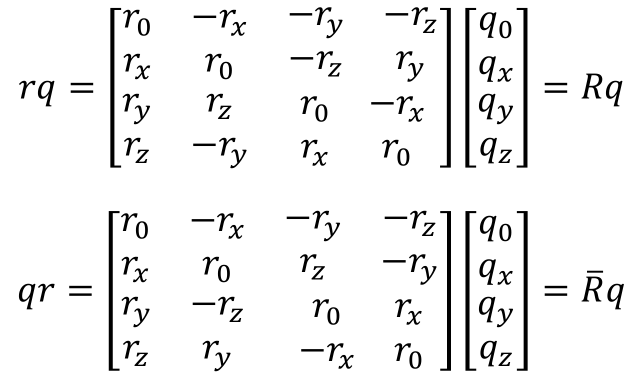
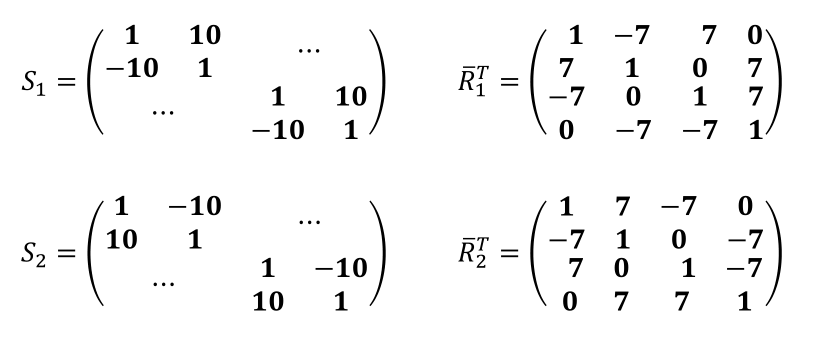
Get $\bar{R}_i^TS_i$ and find the sum across all $i$
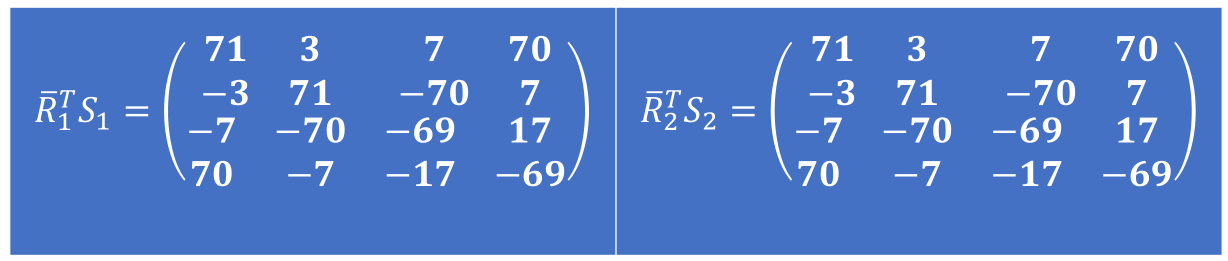
Find the eigenvector of $\sum_{i=0}^{n-1}\bar{R}_i^TS_i$. Let the eigenvector with biggest eigenvalue be $Q$
Find $\theta$ and axis $(u_x, u_y, u_z)$ by rodriguez formula.
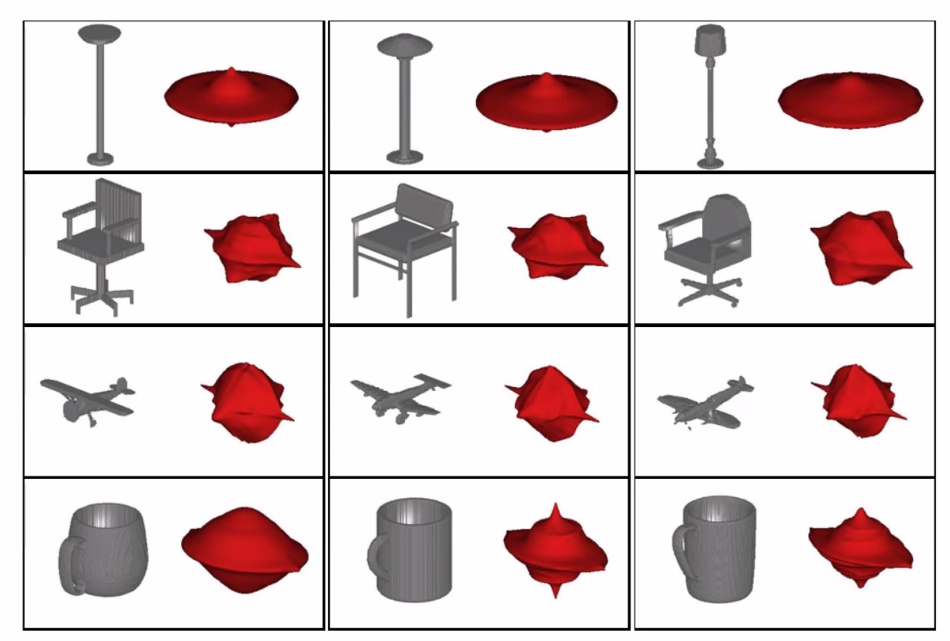
e.g. Image matching in Google’s database. Comparison of extracted features:
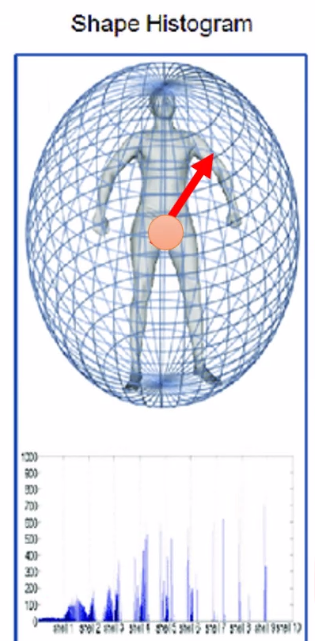
How to parallel in shape matching with databases?
Shoot rays from centroid to vertices on a sphere around the object. Generate a (1D or 2D) histogram based on the hit objects.
???
Better for rounded simpler shapes.
Detects how strong is the symmetry across all principal axes, and generates this red thing.