Overtessellation (from isosurfaces, voxel data, or geometric manipulations)
LODs (level of detail) for efficient geometry processing
Adapt to smaller/weaker display/rendering/memory hardware
Wishful thinking
Optimize between minimizing number of triangles and minimizing difference in quality.
Fairness criteria
Normal deviation
Triangle shape
Scalar attributes
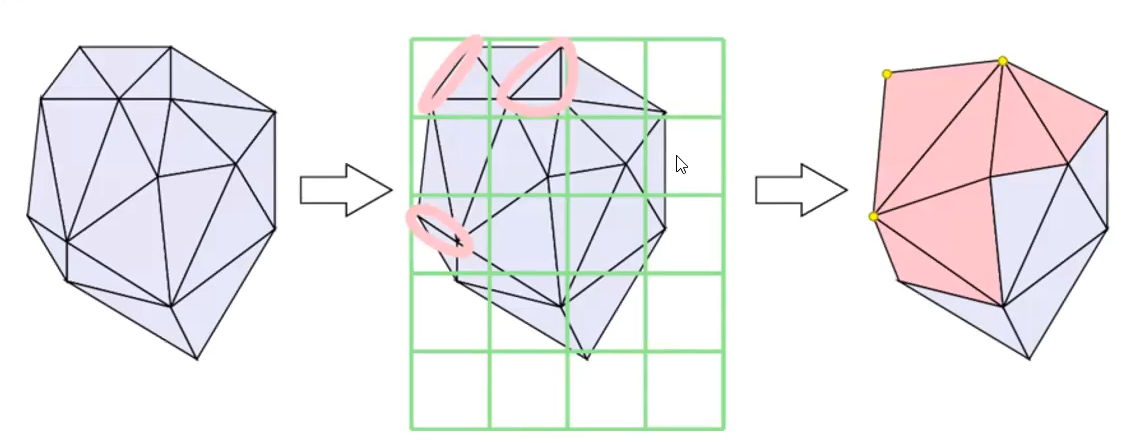
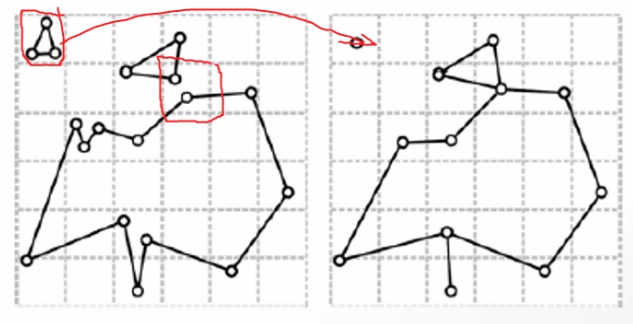
Vertex clustering
One whole cluster of vertices $\rightarrow$ One vertex.
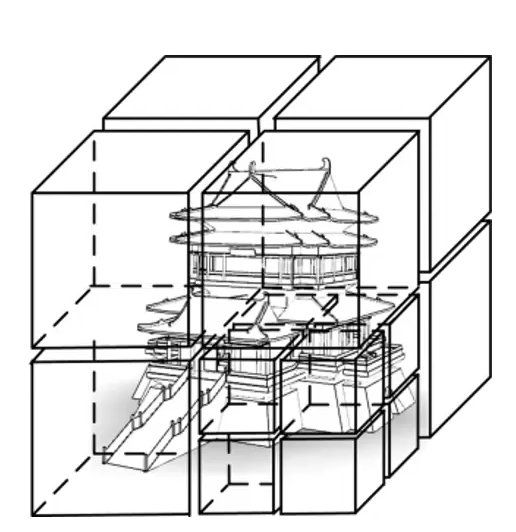
Gridding the model into a uniform 3D grid recursively.
Continue subdividing until each cube has approximately the same number of triangles.
Cluster these vertices into 1 vertex
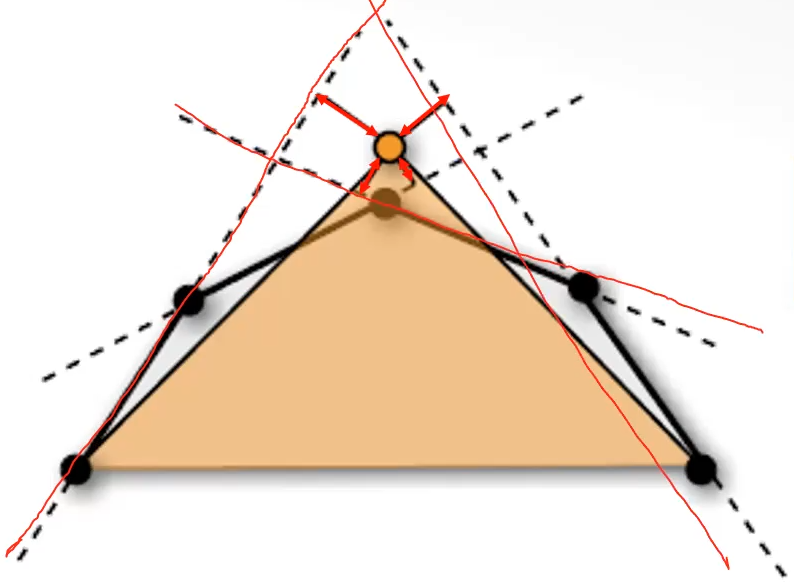
How to position this new vertex?
Ways to position
Average
Geometric median
Error quadrics
Average: Vector sum of deleted vertices and dividing by their count
Acts similarly to a low pass filter: smoothens out any sharp edges.
Median: The point closest to all of the points
Similar to subsampling
Error quadrics (best): The point that minimizes the sum of distance to all the planes of the triangles.
$\sum (v \cdot q)^2 = \sum (v \cdot q)(q \cdot v) = \sum v^Tqq^Tv = \textcolor{red}{v^T \sum qq^T v}$
Preserves features.
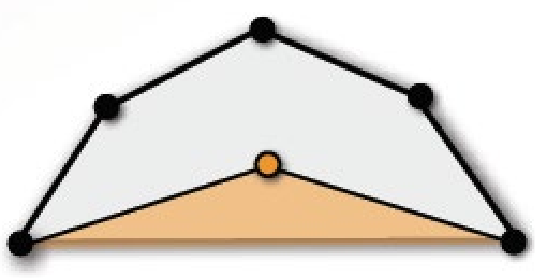
Retriangulation
After deleting the discard vertices, to fill up the holes we now need to
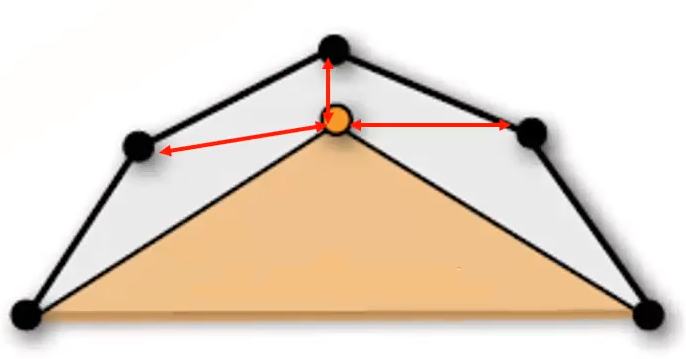
Edge contraction without destroying the representative
Join all the boundary vertices to the representative
Note: this could lead to topology changes, where mesh connectivity changes etc.
Iterative decimation
Set up goal (triangle count, error margin, etc.)
Choose a single decimation operation for a vertex/edge/triangle from a priority queue (decimation priority: which triangles you want to decimate first?)
Vertex deletion/Edge contaction/Vertex merging one at a time
Modify the priority queue if needed
Repeat steps 1 and 2 until goal is reached
Vertex deletion
DOF on how the retriangulation should occur
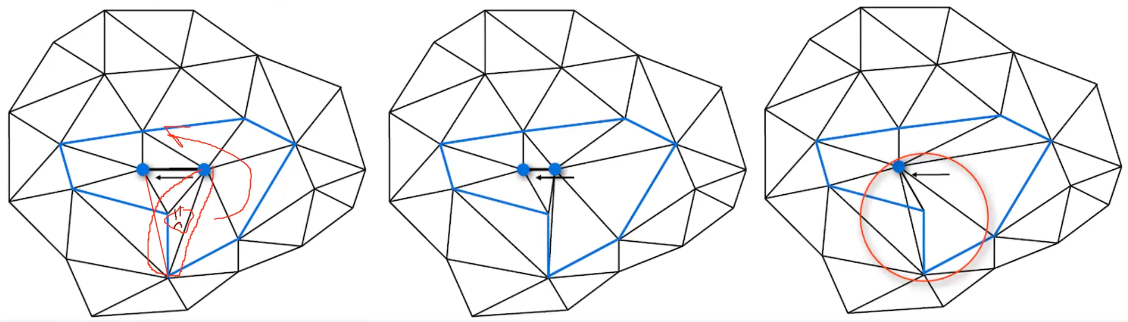
Edge contraction
No DOF, one of the two vertices will act as the “new position”
Merge 2 vertices
DOF on the exact position of the merged vertex
Potential issues
Change in topology (due to vertex merging): handled by link check
Flipped triangles: handled by normal checking of neighbouring triangles
Possible Criteria for deletion
Shortest edge
Least difference in volume after decimation
Curvature
Triangle quality
Local error metrics: Distance of previous point from new planes
Global error metrics: Create an envelope before decimation, to guarantee any shift in position remains within the boundary
Hausdorff distance: Max distance between all the minimum distances between 2 shapes.
user-defined: e.g. coloring of faces so the boundaries are less decimated, highlighted regions.
Quality
Triangle Shape: Ratio of the circumscribed circle’s radius to the shortest edge (bigger is worse)
Dihedral angles: Angles between intersecting planes.