Bone translations and joint rotations.
Kinematics: study of movement positions without considering the forces that brought it into motion.
Degrees of Freedom: Set of independent translational/rotational displacement specifying an object’s pose.
Typical set of DoF for one bone: ${x, y, z, \text{roll, pitch, yaw}}$
Work space: The space in which object’s coordinates are defined (usually $R^3, R^2$).
Configuration space: (aka Joint space) The space of possible object configurations (usually defined by degrees of freedom).
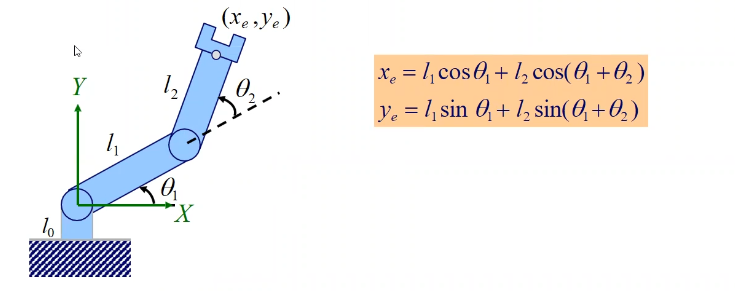
Input: Joint Angles Output: Location of end effectors.
Depth first traversal of skeleton gives a path to the effector.
\[T = (L_0R_0)L_1R_1L_2R_2\dots L_kR_k\]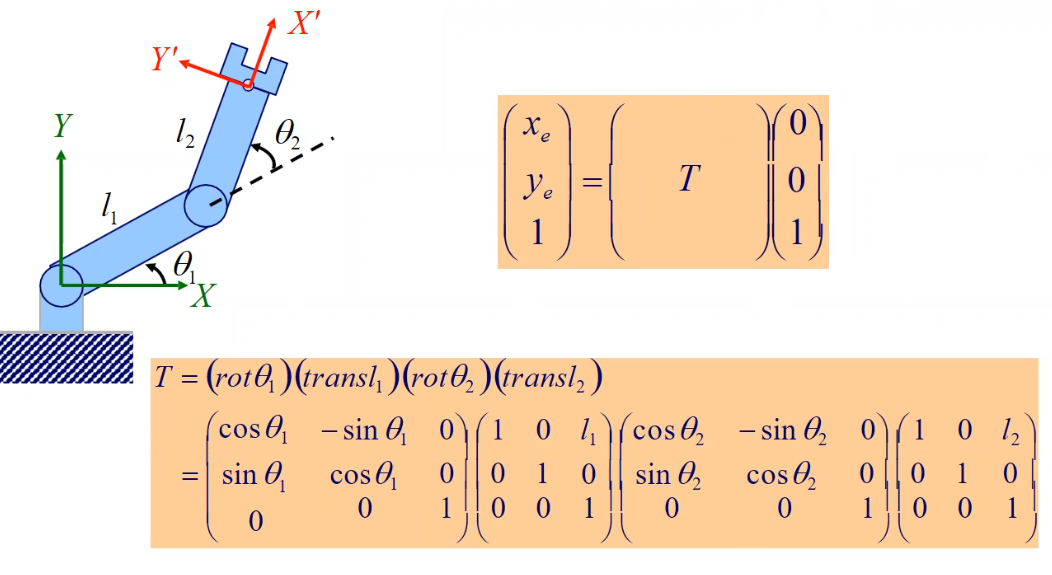
glPushMatrix, glTranslate, glRotate, draw, ...Input: Desired location of end effectors Output: Joint angles required
