Counter clockwise (right hand rule with thumb on arrow side) is positive.
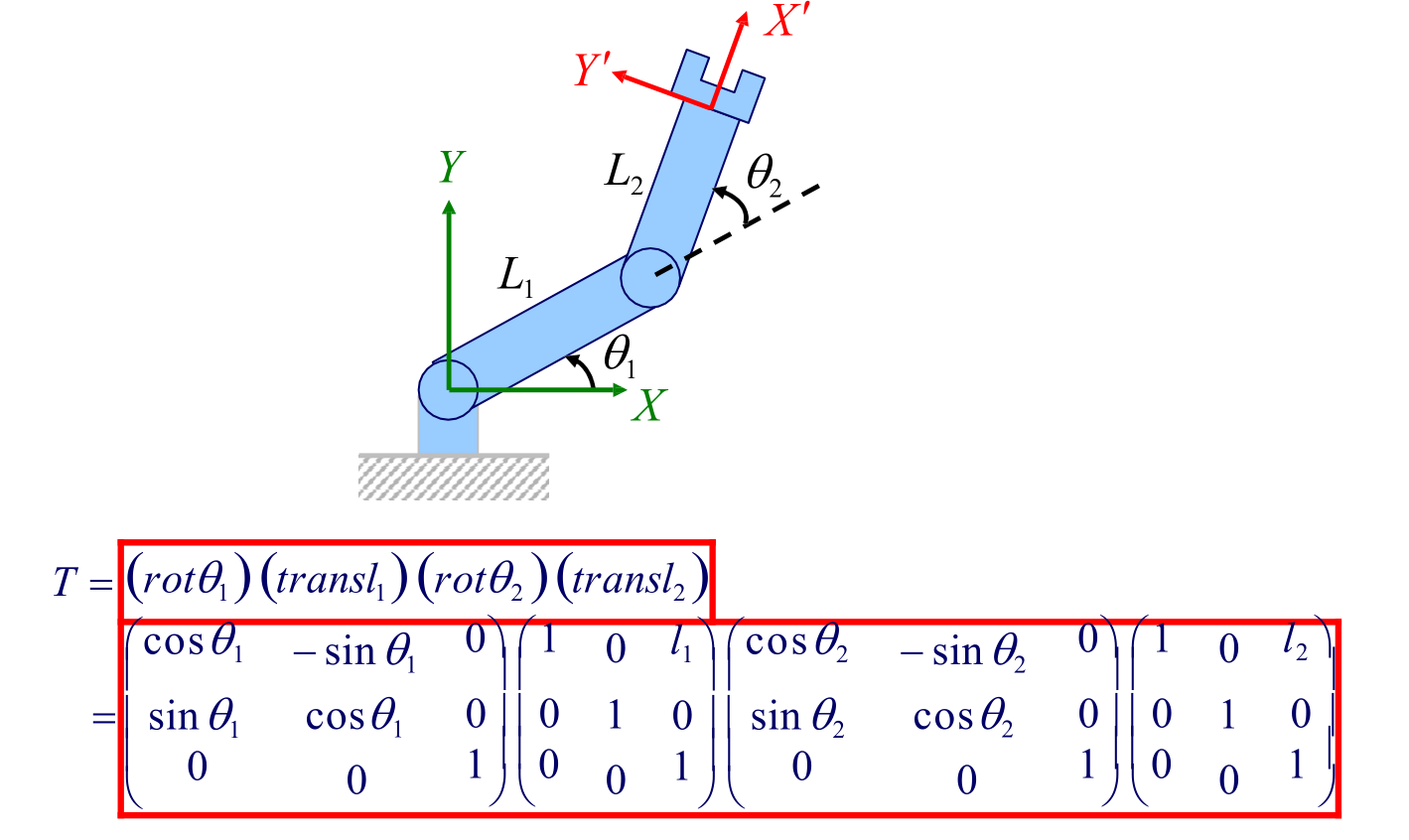
Multiply two rotation matrices together and work out what the angles $\alpha$ and $\theta$ are.
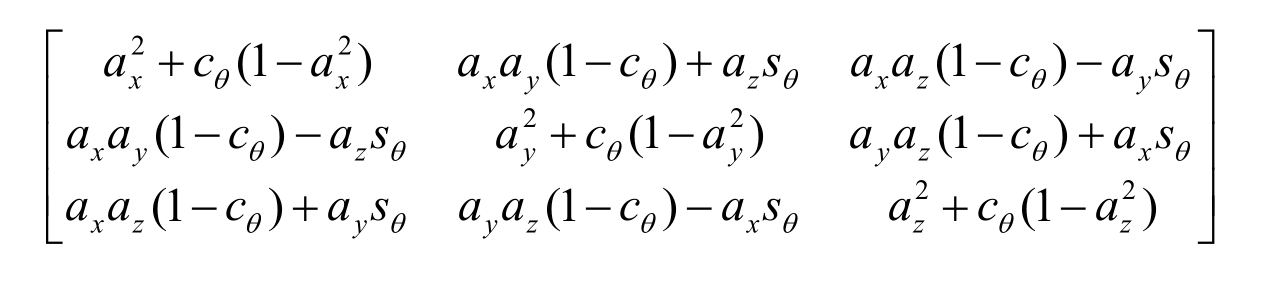
Rotate about axis $a$ by angle $\theta$.
Axis of rotation = normalize(target vector $\times$ orig vector)
\[\begin{aligned} & \text{norm}(a_f \times a_0) \\ &= \text{norm}((1, 1, 1) \times (0, 0, 1)) \\ &= (1, -1, 0) / \sqrt{1^2 + (-1)^2 + 0} \\ &= (\sqrt{1/2}, -\sqrt{1/2}, 0) \end{aligned}\]Angle of rotation = $\cos^{-1}$(unit target dot unit orig)
Substitute into the matrix:
Cross product of two vectors:
\[\left[\begin{matrix}a_1 \\ a_2 \\ a_3\end{matrix}\right] \times \left[\begin{matrix}b_1 \\ b_2 \\ b_3\end{matrix}\right] = \left[\begin{matrix} a_2b_3 - a_3b_2 \\ a_3b_1 - a_1b_3 \\ a_1b_2 - a_2b_1 \end{matrix}\right]\]Multiplication:
\[\begin{aligned} q_1 q_2 &= (w_1, \mathbf{v_1}) \times (w_2, \mathbf{v_2})\\ &= (w_1w_2 - \mathbf{v_1}\times\mathbf{v_2}, \quad\quad & \text{(Scalar)} \\ & w_1\mathbf{v_2} + w_2\mathbf{v_1} + \mathbf{v_1 \times v_2} ) \quad\quad & \text{(Vector)} \end{aligned}\]void renderJoints(JOINT* joint, float*data, float scale) {
glPushMatrix();
// translate
if ( joint->parent == NULL ) { // is Root
glTranslatef( data[0] * scale, data[1] * scale, data[2] * scale );
} else {
glTranslatef( joint->offset.x*scale, joint->offset.y*scale, joint->offset.z*scale );
}
// rotate
for ( uint i=0; i<joint->channels.size(); i++ ) {
CHANNEL *channel = joint->channels[i];
if ( channel->type == X_ROTATION )
glRotatef( data[channel->index], 1.0f, 0.0f, 0.0f );
else if ( channel->type == Y_ROTATION )
glRotatef( data[channel->index], 0.0f, 1.0f, 0.0f );
else if ( channel->type == Z_ROTATION )
glRotatef( data[channel->index], 0.0f, 0.0f, 1.0f );
}
// end site
if ( joint->children.size() == 0 ) {
renderSphere(joint->offset.x*scale, joint->offset.y*scale, joint->offset.z*scale,0.07);
}
if ( joint->children.size() == 1 ) {
JOINT * child = joint->children[ 0 ];
renderSphere(child->offset.x*scale, child->offset.y*scale, child->offset.z*scale,0.07);
}
if ( joint->children.size() > 1 ) {
float center[ 3 ] = { 0.0f, 0.0f, 0.0f };
for ( uint i=0; i<joint->children.size(); i++ )
{
JOINT * child = joint->children[i];
center[0] += child->offset.x;
center[1] += child->offset.y;
center[2] += child->offset.z;
}
center[0] /= joint->children.size() + 1;
center[1] /= joint->children.size() + 1;
center[2] /= joint->children.size() + 1;
renderSphere(center[0]*scale, center[1]*scale, center[2]*scale,0.07);
for ( uint i=0; i<joint->children.size(); i++ )
{
JOINT * child = joint->children[i];
renderSphere(child->offset.x*scale, child->offset.y*scale, child->offset.z*scale,0.07);
}
}
// recursively render all joints
for ( uint i=0; i<joint->children.size(); i++ )
{
renderJointsGL( joint->children[i], data, scale );
}
glPopMatrix();
}
$a$ = axis of rotation
$r$ = distance vector from joint to end effector
$m$ = number of effectors
$v_e$ = velocity of end effector in one step
$\omega_e$ = angular velocity of end effector in one step
\[\mathbf{J} = \left[ \begin{matrix} a_1 \times r_1 & a_2 \times r_2 & \dots & a_m \times r_m \\ a_1 & a_2 & \dots & a_m \end{matrix} \right]\]Solving: \(\begin{aligned} \left[ \begin{matrix} v_e \\ \omega _e \end{matrix} \right] &= \mathbf{J} \left[ \begin{matrix} \Delta\theta_1 \\ \vdots \\ \Delta\theta_m \end{matrix} \right] \\ \left[ \begin{matrix} \Delta\theta_1 \\ \vdots \\ \Delta\theta_m \end{matrix} \right] &= \mathbf{J^+} \left[ \begin{matrix} v_e \\ \omega _e \end{matrix} \right] \\ \theta_{t+1} &= \theta_t + \Delta \theta \end{aligned}\)
Or see gradient descent (Jacobian Transpose).
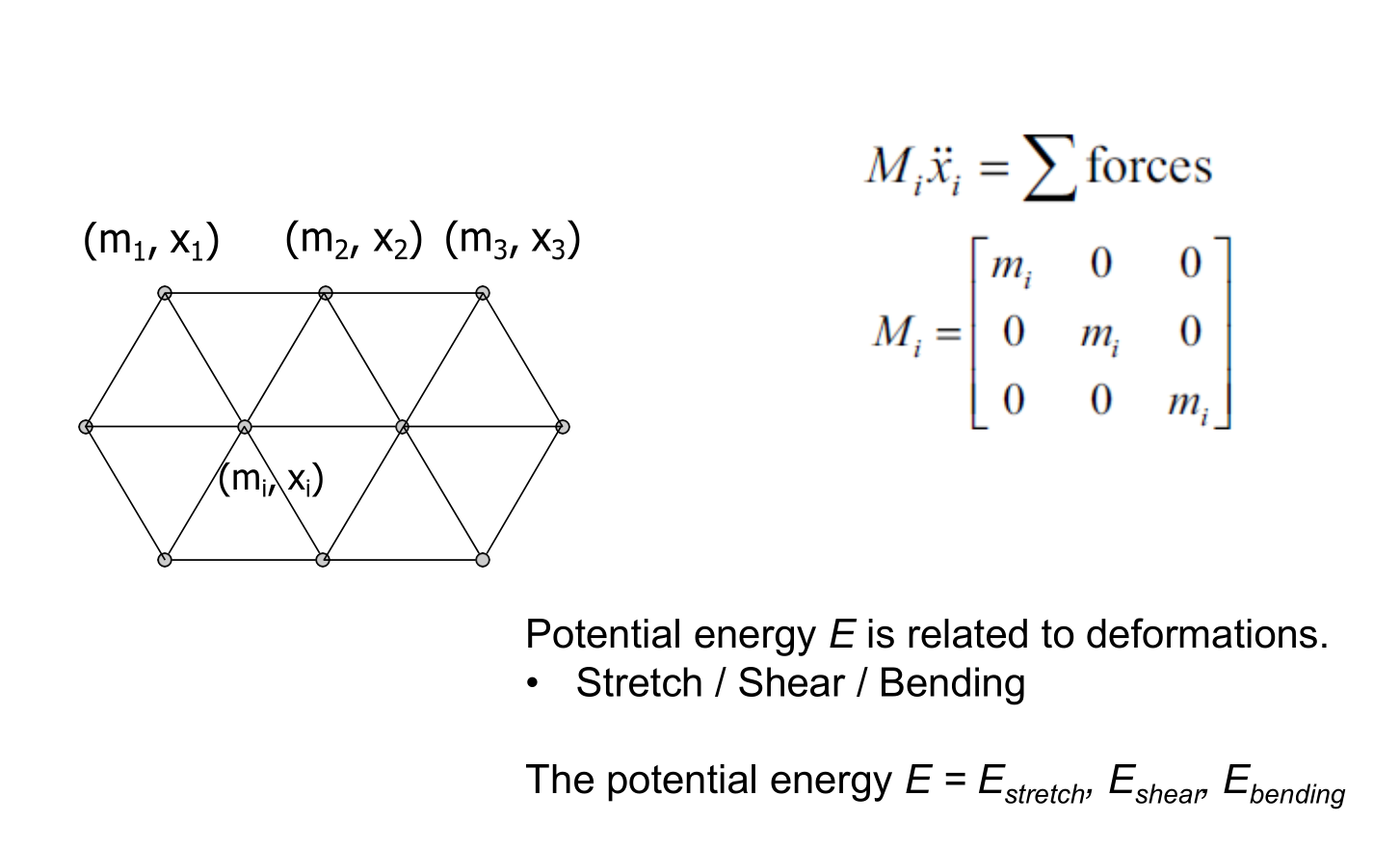
Hooke’s Law + Damping:
\[\]